La simulation de la démarche cadavérique reproduit la cinématique de la cheville
par l’entremise d’interventions propres à la population
Introduction – Utilisation de la simulation pour étudier les conséquences biomécaniques
La simulation cadavérique de la démarche permet aux chercheurs d’étudier directement les conséquences biomécaniques des chirurgies à l’aide de techniques de mesure invasives.
Pourtant, il n’est pas clair si la cinématique du pied et de la cheville qui sont spécifiques à la population est reproduite à l’aide de ces dispositifs. Par conséquent, les chercheurs doivent accéder à la cinématique du pied et de la cheville produite dans un simulateur de démarche cadavérique pendant la phase de position de la démarche dans un ensemble de cinq pieds cadavériques.
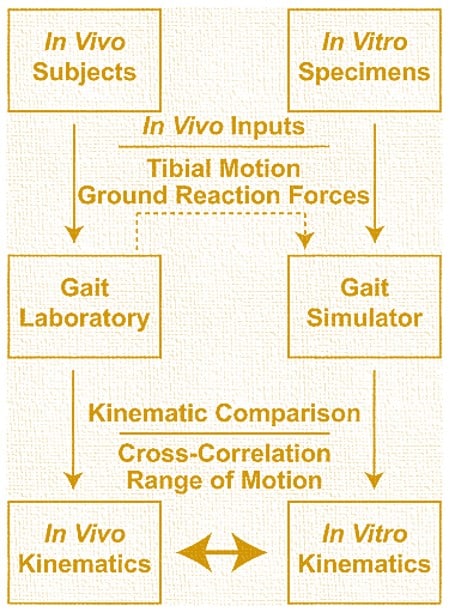
Les mouvements tibiaux et les impacts de réaction au sol autrefois recueillis actifs dans un groupe d’adultes en bonne santé ont été appliqués comme paramètres d’entrée. Des cinématiques processuelles de pied et de cheville ont été obtenues et directement comparées à la cinématique active population-spécifique des adultes en bonne santé identiques à partir desquels des paramètres d’entrée ont été obtenus. Les évaluations ont été réalisées à l’aide d’une corrélation croisée pour déterminer les similitudes dans les profils cinématiques et les amplitudes de mouvement articulaires ont été calculées pour établir des différences absolues dans la cinématique.
La cinématique de joint processual de cheville, subtalar, et talonavicular a été franchement corrélée à la cinématique commune active. En outre, la cinématique active et processuelle de pied et de cheville a indiqué des quantités semblables de variabilité d’intérieur-groupe. Les résultats de l’étude suggèrent (avec un degré élevé de confiance) que les techniques de simulation de la démarche cadavérique reproduisent la cinématique du pied et de la cheville spécifiques à la population, offrant un outil de recherche précieux pour analyser les traitements chirurgicaux des difficultés du pied et de la cheville.
Outils et Techniques Pendant la Simulation de Démarche
Les mouvements tibiaux actifs et les impacts de la réaction au sol recueillis auprès d’adultes mâles en bonne santé et les impacts musculaires estimés ont été utilisés comme réponses pour simuler la démarche spécifique à la population dans un simulateur de démarche cadavérique. Des simulations en temps réel ont été réalisées à une vitesse d’un sixième et à un quart de poids corporel (respectivement) pour établir la fidélité du simulateur dans des conditions de chargement qui n’endommageraient pas l’échantillon et seraient pertinentes pour les interventions chirurgicales qui prévoient d’étudier à l’avenir. Pour confirmer que la simulation de la démarche cadavérique est indépendante de la vitesse ou de l’ampleur de la charge, nous avons simulé la démarche dans un seul échantillon de vitesses jusqu’à la moitié de la vitesse réelle et un poids corporel, respectivement (voir Matériel supplémentaire).
Différentes vitesses et charges de simulation n’ont pas fortement affecté des modèles cinématiques de pied et de cheville. Un algorithme d’apprentissage itératif a été utilisé pour contrôler les trois composantes de l’impact de réaction au sol.
Entrées et forces de réaction au sol du mouvement tibial
Des données actives de démarche rassemblées dans cinq mâles en bonne santé ont été employées comme entrées dans un simulateur cadavérique de démarche. La cheville, le subtalar, et la cinématique talonavicular ont été directement mesurés utilisant les goupilles intracortical d’os dans le même ensemble de cinq mâles en bonne santé (actif) et dans le simulateur cadavérique de démarche dans un ensemble de cinq pieds cadavériques masculins (processual). Ces cinématiques du pied et de la cheville ont été comparées entre et au sein des groupes pour déterminer la similitude et la variabilité cinématiques.
Cinq spécimens mâles cadavériques de mi-tibia (âge à la mort : ± ans) avec l’alignement neutre de pied et aucune histoire de trauma ou de chirurgie d’extrémité inférieure ont été examinés. Des tissus mous approximativement cm supérieur au joint de cheville ont été enlevés. Des tendons des surae de triceps (Achille), du longus de hallucis et de digitorum de fléchisseur, du longus de hallucis et de digitorum d’extenseur, du tibialis postérieur et antérieur, et du longus et du brevis péronéaux ont été libérés de n’importe quel tissu de muscle.
Le soin a été pris pour maintenir les contraintes de retinaculum et de tissu mou du joint de cheville. Le péroné a été fixé au tibia utilisant une vis quad-corticale simple, et le tibia a été cimenté avec le polymethyl-méthacrylate dans un cylindre de montage.
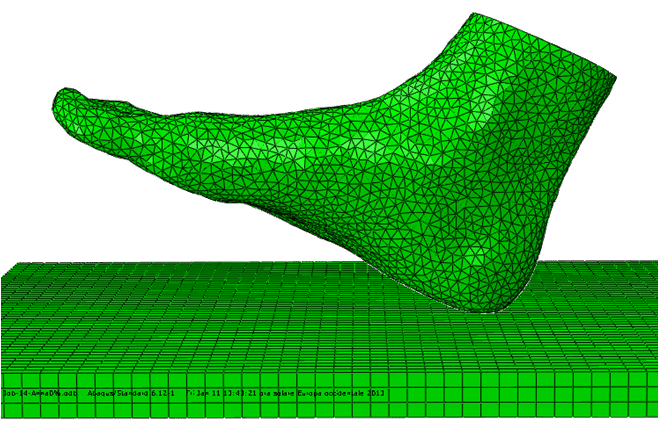
Pour mesurer la cinématique commune, des faisceaux composés de quatre marqueurs rétroréfléchissants ont été rigidement fixés au tibia, au talus, au calcanéum, et à la naviculaire utilisant des broches d’os. Des broches ont été placées sous la fluoroscopie pour confirmer que des espaces communs n’ont pas été percés, et la manipulation manuelle a confirmé que les marqueurs étaient rigidement fixés à chaque os.
Le simulateur de démarche cadavérique (Fig.) a prescrit des mouvements tibiaux non contraints par rapport au sol et a appliqué des charges musculaires physiologiques aux neuf tendons extrinsèques du pied et de la cheville, qui ont été montrés par Aubin et al. pour être précis et reproductible. Les mouvements tibiaux et les impacts de la réaction au sol tirés des données actives recueillies précédemment ont servi de données d’entrée au simulateur.
Le degré de liberté de la plate-forme robotique a déplacé une plaque d’impact autour du tibia, et les charges inertielles ont été soustraites des impacts de réaction au sol mesurés, qui sont tous deux reproductibles.
Lors de la simulation de la position tardive, les grandes excursions du centre de l’articulation de la cheville nécessitent que la plate-forme robotique se déplace en dehors de son volume de travail limité. Les mouvements de trajectoire de simulation ont été réduits de 0% à 0% de la phase de position pour permettre le bon fonctionnement de l’appareil et fournir une gamme complète de simulation de mouvement pour la majorité de la phase de position où les charges sont les plus importantes.
Les cibles d’impact musculaire (voir le matériel d’accompagnement) ont été approchées à partir de valeurs rapportées dans la littérature et ont été utilisées dans des études antérieures qui utilisaient un simulateur de démarche robotique similaire et temporellement mis à l’échelle pour correspondre aux autres données d’entrée.
Des cellules de charge ont été placées en série avec chaque câble de moteur à côté du tendon pour expliquer n’importe quel frottement dans le boîtier de câble. Le tendon d’Achille a été fixé à l’aide d’une pince en aluminium; les huit tendons plus petits ont été saisis avec un noeud d’attelage de clou de girofle qui a été réanimé avec une vis et un écrou.
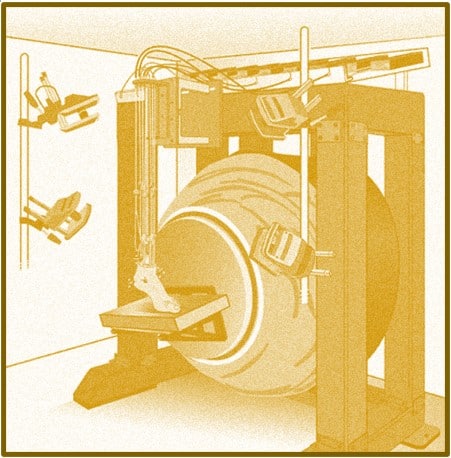
Simulation de démarche cadavérique via une plaque à impact fixe
Le simulateur de démarche cadavérique a tiré parti d’une plate-forme robotique à haut degré de liberté qui a déplacé une plaque d’impact sur un tibia fixe tandis que neuf actionneurs linéaires appliquaient des profils de chargement prescrits aux tendons extrinsèques du pied et de la cheville. La cinématique du pied et de la cheville a été quantifiée avec un système de capture de mouvement de caméra.
Les impacts verticaux et les impacts de réaction au sol de cisaillement ont été contrôlés à l’aide d’un algorithme itératif de contrôle de l’apprentissage, à l’aide d’un algorithme similaire utilisé pour contrôler l’impact vertical de la réaction au sol, et des ajustements ont été apportés au profil d’impact du tendon d’Achille. L’algorithme de contrôle a modifié la trajectoire de la plaque d’impact par rapport au tibia afin de réduire l’erreur entre la cible et les impacts mesurés de la réaction au sol.
La trajectoire initiale des déplacements de l’articulation de la cheville a été mise à l’échelle en fonction de la taille du pied pour améliorer l’efficacité de l’algorithme de contrôle, une technique qui a été mise en œuvre par les chercheurs précédents.
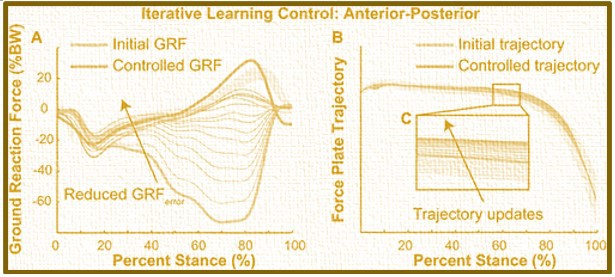
Iterative Learning Control (ILC) Algorithmic Application Reducing Ground Reaction Impact Error
The iterative learning control (ILC) algorithm consistently reduced the ground reaction impact error through iterative updates to the impact plate trajectory. The anterior-posterior ground reaction impact (A) was well-controlled following – ILC simulations. The ILC algorithm (B) applied small and consistent updates to the impact plate trajectory (C) that were within one standard deviation of the active tibial motion inputs.
Processual foot and ankle kinematics were measured during simulated gait with an -camera motion capture system (T-0s, Vicon Motion Systems, Oxford, UK) and directly compared to active kinematics. Unlike previous studies,, we compared these processual foot and ankle kinematics with active foot and ankle kinematics that were previously collected from the same population from which the simulator inputs were acquired. Foot and ankle kinematics were characterized using three common clinical measurements: Ankle sagittal motion, subtalar coronal motion, and talonavicular axial motion.
Both the active and processual data were processed using the same custom analysis routines (MATLAB, MathWorks, Ansys Workbench). Joint coordinate systems were defined during a standing trial for each active subject and processual specimen: The principle axes of the motion capture coordinate system were directed medially, anteriorly, and superiorly defining plantar flexion, eversion, and adduction as positive values, respectively. The processual joint coordinate systems were defined when the foot was loaded with a 0 N ground reaction impact and 0 N Achilles tension to simulate joint orientations during standing at approximately one-quarter bodyweight.
Foot and ankle kinematics during the entire stance phase were calculated from the active and processual data sets and compared to determine the capacity of the cadaveric gait simulator to reproduce foot and ankle kinematics during gait. Kinematic data were calculated from successive simulation trials, which displayed minor variation within specimens and therefore, were averaged within each specimen for analysis. Cross correlation analyses (MATLAB’s xcorr function) were performed to compare the shape of the processual outcome variables with the active kinematic outcomes.
Inter-specimen (processual) and inter-subject (active) variabilities were quantified within each group using cross correlation of mean kinematics between each specimen-specimen and subject-subject combination. Comparisons with a cross correlation coefficient (rxy) greater than 0. and 0. were moderately and strongly correlated, respectively. Joint ranges of motion were calculated to determine absolute differences between active and processual foot and ankle kinematics and for direct comparison to the literature.
Simulation Results | Ankle, Subtalar & Talonavicular Kinematics
Processual foot and ankle kinematics positively correlated with the average active kinematics and spanned similar ranges of motion. Ankle plantarflexion was strongly correlated between the active and processual kinematics. Similarly, processual subtalar and talonavicular kinematics were moderately correlated with active kinematics. Processual ankle kinematics spanned more motion during stance compared to active kinematics. Subtalar and talonavicular range of motion were similar between the groups (Refer to Table below).
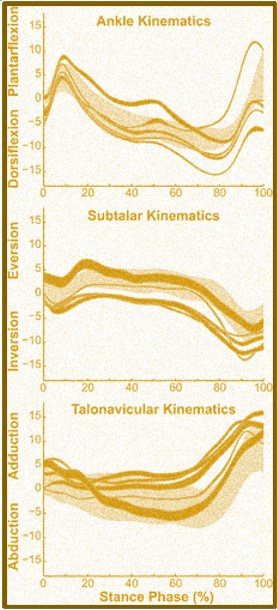
Kinematic Correlations
Foot and ankle kinematics measured processual (dark gold lines, average ± one standard deviation) correlated with average kinematics measured active (gold ring, average ± one standard deviation). Ankle processual kinematics strongly correlated with active motion, while subtalar and talonavicular processual kinematics were both moderately correlated with the active population mean.
Ankle Range of Motion (ROM) During Posture Phase of Gait
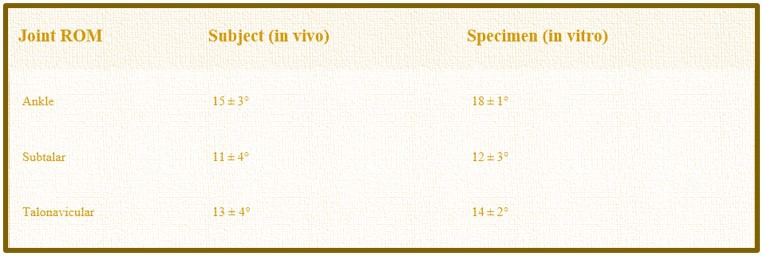
- Range of Motion (ROM). Median Joint Range of Motion ± Standard Deviation
Within-specimen (processual) and within-subject (active) analyses each demonstrated similar amounts of correlation and variability in foot and ankle kinematics. Ankle kinematics within each group were the most strongly correlated (rxy > 0.). Subtalar and talonavicular within group kinematics showed moderate correlations.
Contained by Group Ankle & Foot Kinematic Variability
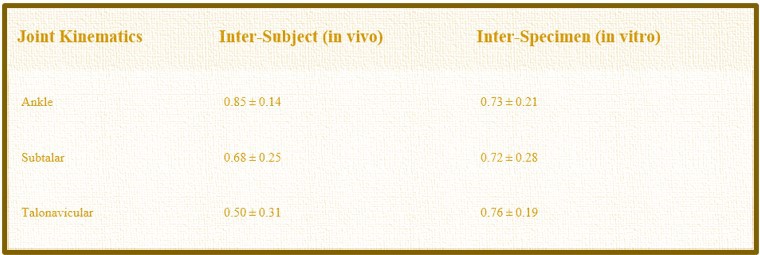
- Average cross correlation coefficients, rxy, and Standard Deviations.
Conclusion | Gait Simulation Recreating Foot and Ankle Kinematics
In overview, the team demonstrated that cadaveric gait simulation recreates foot and ankle kinematics using active input data from a particular population. Processual foot and ankle kinematics measured on our simulator compared favorably to active kinematics measured in a group of healthy adults. The cadaveric gait simulator also recreated kinematic variability demonstrating the effect of intrinsic foot and ankle properties on gait mechanics. These findings support cadaveric gait simulation techniques for studying foot and ankle mechanics and testing surgical procedures in specific populations. Since patients treated for maladies of the foot and ankle adopt different gait mechanics to compensate for pain and mechanical constraints placed on the foot and ankle, population-specific simulator techniques are needed to elucidate altered foot and ankle mechanics caused by surgical treatments.
Our cadaveric gait simulator reproduced population specific foot and ankle kinematics that are similar to active kinematics. Cross correlation analyses revealed moderate and strong correlations between the active and processual foot and ankle kinematics; ranges of joint motion were also similar. Active foot and ankle kinematics are positively correlated among a similar group of participants and exhibited similar variability between test specimens. Variations in muscle impacts may be an important contributor to kinematic variability, and altered impacts have been identified in patient groups with foot and ankle maladies. Extrinsic muscles affect kinematics and joint contact mechanics and therefore, should be considered when simulating patient population-specific gait.
While previous work established specific gait kinematic attributes within patient populations,, a degree of natural variability exists among individuals. Foot and ankle kinematics analyzed demonstrated similar amounts of variability when compared to active kinematics. Ankle sagittal kinematics were the least variable, while the subtalar and talonavicular joints were significantly variable, highlighting the interaction between hindfoot joint structure variability and foot function., It is critical to reproduce natural variability in an experimental model since about half of patients receiving an ankle fusion develop arthritis in the adjacent joints, a potential result of variable hindfoot mobility.
Cadaveric gait simulation techniques have several benefits for studying foot and ankle mechanics. Kinematics, ligament and bone strain, and joint contact mechanics can be directly measured with motion capture, strain sensors, and pressure sensitive sensors, respectively.
In contrast, active measurement techniques either are invasive, utilize ionizing radiation,, simplify multi-joint motion of the hindfoot to a single joint, or are affected by skin-motion artifact. Cadaveric simulation controls for differences in walking speed and neuro-muscular drive, two factors that affect foot and ankle kinematics. Implementing different control strategies allows researchers to answer questions ranging from joint contact mechanics to neuro-muscular function. Information derived from cadaveric simulations of gait may inform and improve computational modeling approaches that predict implant wear, load transfer, and surgical outcomes.

Case Study Limitations | Gait Simulation
To provide further researchers with study-specific limitations, to ensure proper attribution, and preserving the ethos of the scientific method, we acknowledge that several limitations affected this study.
The cadaveric gait simulator requires tibial motions, ground reaction impacts, and muscle impact profiles to simulate human movement. While tibial motions and ground reaction impacts are commonly quantified in patient populations, quantifying muscle loads requires assumptions, and altering these loads affect foot and ankle mechanics., Utilizing computational models to approximate muscle tension may provide important data for simulating gait in patient-populations.
The reiterative learning control algorithm and trajectory scaling based on the foot length accounts for some of the specimen-specific anatomic variability and more robust scaling routines that alter the trajectory based on additional specimen morphology may further improve simulator fidelity. Foot and ankle kinematics were compared to data collected in a small cohort of five healthy young adults, but these active data serve as the only complete set of foot and ankle kinematics due to the invasive nature of the measurements.
Although the test included a set of cadaveric feet acquired from young males, these kinematic results are likely generalizable to both females and older adults with no functional limitations. We used a single syndesmotic screw to stabilize the tibia-fibular joint and also tested a single specimen with zero and three syndesmotic screws, finding no effect of syndesmotic reduction on ankle joint motion. Vertical ground reaction impacts were elevated during the final stance computation and the scaled trajectories and real time Achilles’ tendon controller reduced this reaction impact while maintaining friction between the foot and the plate.
Lastly, simulations were performed at reduced loads and speeds, and, while the viscoelastic properties of the foot and ankle theoretically affect simulation outcomes, our investigation of simulation speed and load found little effect on foot and ankle kinematics.
In closing, the findings support the use of cadaveric gait simulation to examine the effects of surgical treatments on population-specific foot and ankle mechanics. Processual foot and ankle kinematics reproduced in our cadaveric gait simulator compared favorably with active kinematics directly measured in a group of healthy adults. Simulating gait with a high degree of freedom platform provides the additional flexibility required to input patient population tibial kinematics. Cadaveric gait simulation methods provide a stage to directly test the effects of surgical procedures on specific patient populations and directly measure foot and ankle procedure with invasive techniques not viable in live patients or relevant test subjects.