Introduction to Drone and eVTOL Motor Design
As electric aircraft, eVTOL platforms, and high-performance drones continue to advance, propulsion system design is becoming increasingly demanding. Engineers are being asked to deliver motors that are lighter, more efficient, more thermally resilient, and better integrated with the full powertrain system.
But “high performance” does not mean the same thing for every application.
For a racing drones, performance may center on maximum power-to-weight ratio and burst torque for rapid maneuverability. For an eVTOL aircraft, performance may depend on sustained mission efficiency, thermal endurance during vertical takeoff and landing, system reliability, and acoustic signature management for urban environments.

In both cases, electric motor design is no longer just about meeting a single torque or efficiency target. It requires a mission-driven, multiphysics approach that accounts for electromagnetic performance, thermal limits, mechanical integration, cooling strategy, drive cycle behavior, and system-level trade-offs.
That was the focus of SimuTech Group’s recent webinar, Mastering High-Performance eVTOL and Drone Motors with Ansys Motor-CAD, presented by Ahmed Abdelrahman, Senior Staff Engineer – Electromagnetics, and Batuhan Sirri Yilmaz, Engineering Analyst – Electromagnetics.
High-Performance Motor Design Starts with the Mission Profile
In traditional industrial motor design, high performance might mean long operating life, reliable efficiency, and a stable duty cycle. In aerospace and drone propulsion, the design target is much more dynamic.
Performance is dictated by the mission profile.
For drone applications, engineers must balance requirements such as:
- Maximum thrust-to-weight ratio
- High burst torque
- Efficient hover and cruise operation
- Motor-propeller matching
- Battery life and total mission range
- Thermal behavior across changing operating conditions
For eVTOL aircraft, the performance targets may shift toward:
- High power density for compact propulsion
- Sustained efficiency to maximize range
- Thermal endurance during takeoff, hover, and landing
- Fault tolerance and reliability
- Low acoustic signature for public acceptance
- Tight integration with power electronics and cooling systems
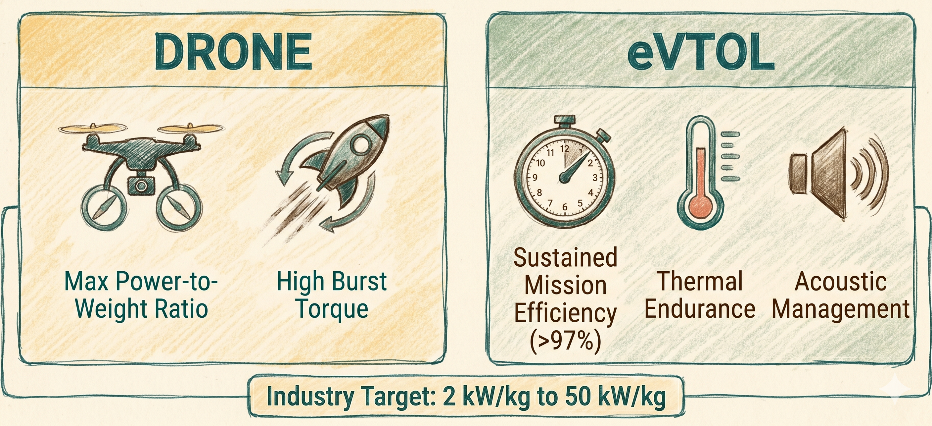
The industry is moving well beyond conventional industrial motor benchmarks. While traditional motors may operate around lower power density targets, aerospace and advanced mobility applications are pushing toward significantly higher power density ranges, requiring a more integrated approach to design.
Electric Propulsion Architectures Are Evolving
Modern aviation electrification includes several propulsion architectures, each with different implications for motor design.
Hybrid-electric systems combine conventional propulsion with electric power. These systems may use electric energy during acceleration, takeoff, or other high-power demand events, with bi-directional power flow between the generator and battery.
Turbo-electric systems convert turbine shaft power into electrical energy, which then drives multiple distributed fans through electric motors. This enables distributed propulsion while still relying on a central turbine.
All-electric systems rely entirely on electric motors powered by batteries. This architecture offers the simplest energy flow and supports zero-emission operation at the aircraft level, but it remains constrained by battery energy density.
Across these architectures, the trend is clear: greater electrification increases the importance of electric motor performance, system integration, and thermal management.
Key Trends in eVTOL Electric Propulsion
Several technology trends are shaping the next generation of eVTOL propulsion systems.
One major trend is distributed electric propulsion, where multiple smaller, high-power-density motors replace a single large propulsion unit. This approach supports redundancy and fault-tolerant operation, which are critical in aviation applications.
Another trend is higher-frequency operation, often enabled by advanced power electronics. Wide-bandgap devices such as SiC and GaN allow higher switching speeds and improved efficiency, but they also introduce new design considerations related to losses, harmonics, and thermal performance.
Engineers are also moving toward integrated motor drives, where the motor and inverter may share housing, packaging, and cooling systems. This reduces system size and improves power density, but it also increases the need to evaluate electromagnetic, thermal, and mechanical interactions together.
Additional design trends include segmented stators, integrated bus structures, multi-phase architectures, and fault-tolerant configurations such as six-phase or dual three-phase systems. These architectures help ensure continued operation under fault conditions while supporting the compactness and reliability required for advanced aircraft propulsion.
| Topology | Key Advantages | Active Mass Breakdown | Primary Application |
|---|---|---|---|
| Axial Flux (Pancake) |
|
|
eVTOL Lift Motors: Optimized for direct-drive operation and maximum heat dissipation. |
| Outer Rotor (Radial Flux) |
|
|
Drone Flight Control: Ideal for mechanical integration and pitch mechanisms. |
Thermal Management Is a Primary Performance Limiter
For high-power-density motors, thermal management is often one of the most important design constraints.
Traditional winding insulation materials can have low thermal conductivity, which creates a barrier to removing heat from the windings. As current density increases, this thermal bottleneck becomes more severe. Engineers may need to evaluate advanced cooling strategies such as direct conductor cooling, integrated stator ducts, direct liquid cooling, two-phase cooling, or other application-specific approaches.
This is especially important because eVTOL and drone motors do not operate under one simple condition. They experience different thermal loads throughout the mission.
During hover, takeoff, or rapid maneuvering, the motor may experience short-duration peak thermal loads. During cruise, it may operate under a lower but more sustained load. These mission-dependent conditions directly affect winding temperature, magnet temperature, copper losses, efficiency, and long-term reliability.
The key takeaway: achieving high current density is not only an electromagnetic challenge. It is also a thermal and materials challenge. Motor topology, cooling strategy, material selection, and mission profile must be considered together.
Why Optimization Matters in eVTOL Motor Design
High-performance electric motor design is full of trade-offs.
Engineers may want the smallest possible motor, the highest efficiency, the lowest weight, the lowest cost, and the best thermal performance. But these goals often conflict. Improving one objective may negatively affect another.
For example, increasing efficiency may require additional active material, which can increase mass. Reducing motor volume may worsen thermal behavior. Lowering cost may limit material or cooling options.
This is where multi-objective optimization becomes essential.
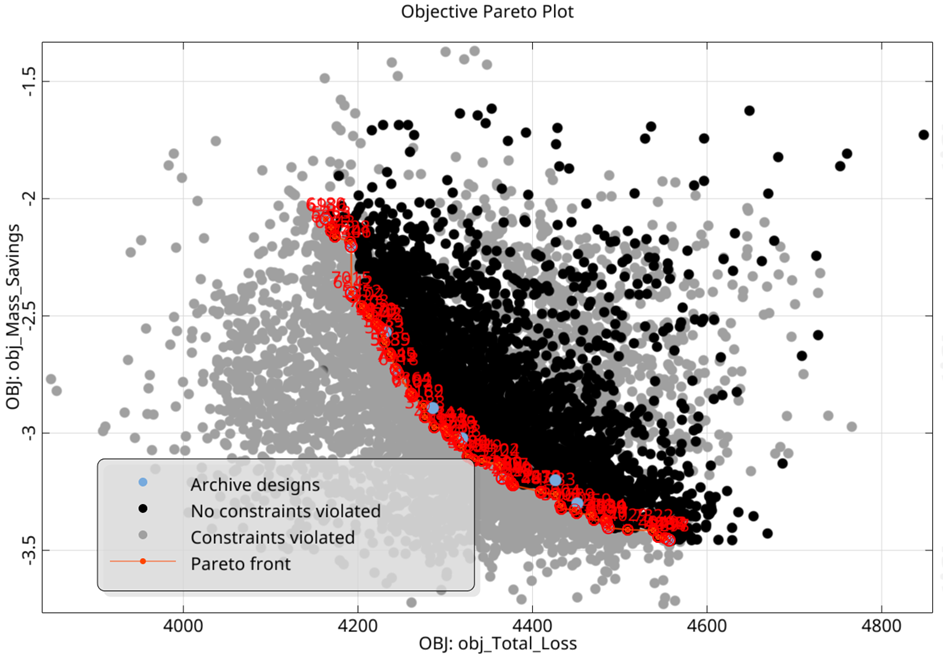
Rather than searching for one universal “best” design, engineers can use optimization to identify the Pareto front: the set of best-achievable designs under defined constraints and objectives. Each point on the Pareto front represents a different balance of trade-offs. The final design selection depends on the application’s priorities, such as efficiency, mass, cost, volume, thermal margin, or manufacturability.
Because electric motor performance is evaluated through simulation rather than a simple analytical equation, optimization often becomes a black-box problem. Each design candidate must be evaluated individually, making simulation-driven and derivative-free optimization methods especially valuable.
Using Ansys Motor-CAD for Multiphysics Electric Machine Design
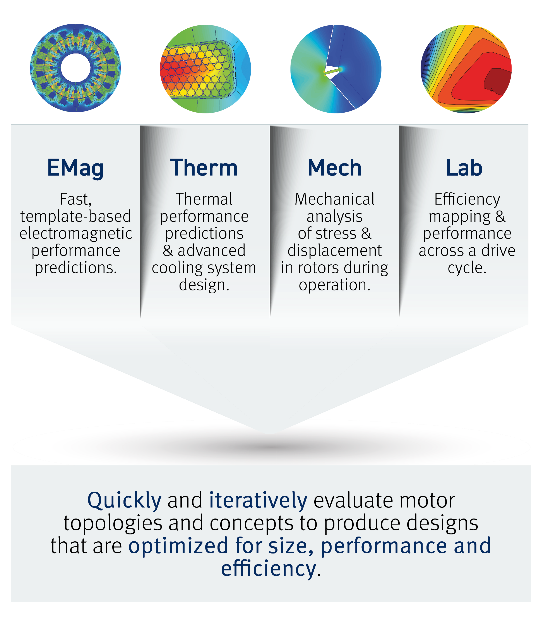
Ansys Motor-CAD is designed specifically for electric machine analysis and design. It allows engineers to evaluate electromagnetic, thermal, mechanical, and system-level performance across the full operating range of a motor.
This is especially valuable in early-stage design, where topology and architecture decisions have the greatest impact and the cost of change is still relatively low.
With Motor-CAD, engineers can quickly compare motor concepts, evaluate operating points, review efficiency maps, assess losses, and understand how design changes affect performance. This allows teams to make better topology and sizing decisions before committing to more detailed development.
For high-performance eVTOL and drone applications, this early insight is critical. Design teams need to understand not just whether a motor can meet a target operating point, but how it behaves across the mission profile.
For a deeper walkthrough of these Motor-CAD workflows, view the full on-demand webinar.
Coupling Motor-CAD with optiSLang
When Motor-CAD is coupled with Ansys optiSLang, teams can move from simulation to structured design exploration and optimization.
Motor-CAD acts as the physics engine, evaluating the motor’s electromagnetic, thermal, and mechanical behavior. optiSLang manages the design exploration and optimization process, helping engineers investigate large design spaces, identify sensitivities, and make data-driven decisions.
This workflow can support:
- Sensitivity analysis to understand which inputs most affect performance
- Metamodeling to approximate complex simulation behavior
- Multi-objective optimization across competing design goals
- Validation against detailed Motor-CAD or FEA results
In practice, this allows engineers to evaluate design candidates against full specifications, including continuous torque, peak torque, thermal limits, mechanical constraints, efficiency targets, volume, and cost.
Instead of relying only on intuition, teams can use a systematic, data-driven approach to identify balanced high-performing designs.
Drone Motors Add Another Layer: Propeller Matching
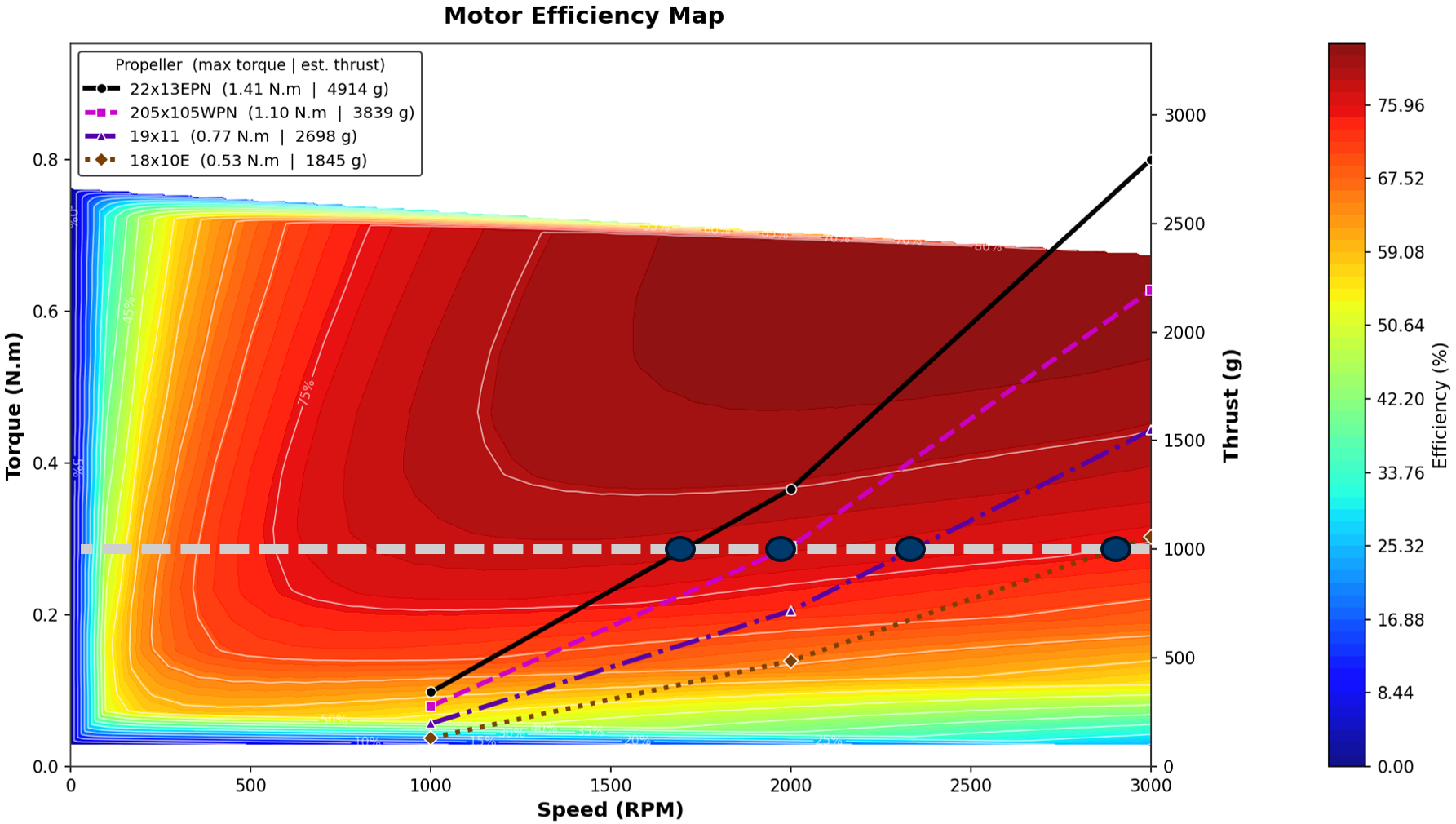
Drone propulsion introduces its own set of design challenges because the motor and propeller must be treated as a coupled system.
The motor provides torque and rotational speed. The propeller converts that rotation into aerodynamic thrust. For an efficient propulsion system, the motor’s high-efficiency operating region should overlap with the propeller load curve.
This means that selecting a propeller is not simply a matter of choosing a size that produces the required thrust. Different propellers may produce the same thrust at different speeds and power levels. For example, a larger propeller may achieve the same thrust at a lower RPM and lower input power, improving grams-per-watt efficiency.
Important motor and propeller parameters include:
- Motor KV, or no-load speed constant
- Torque constant
- Pole and stator slot configuration
- Stator diameter and height
- Propeller diameter
- Propeller pitch
- Blade count
- Maximum thrust
- Input power
- Battery voltage
- Peak power duration
Motor-CAD allows engineers to model these relationships and evaluate whether the motor and propeller are well matched for the intended operating conditions.
Evaluating Thermal Performance Across Drone Drive Cycles
Drone motors also face important thermal constraints.
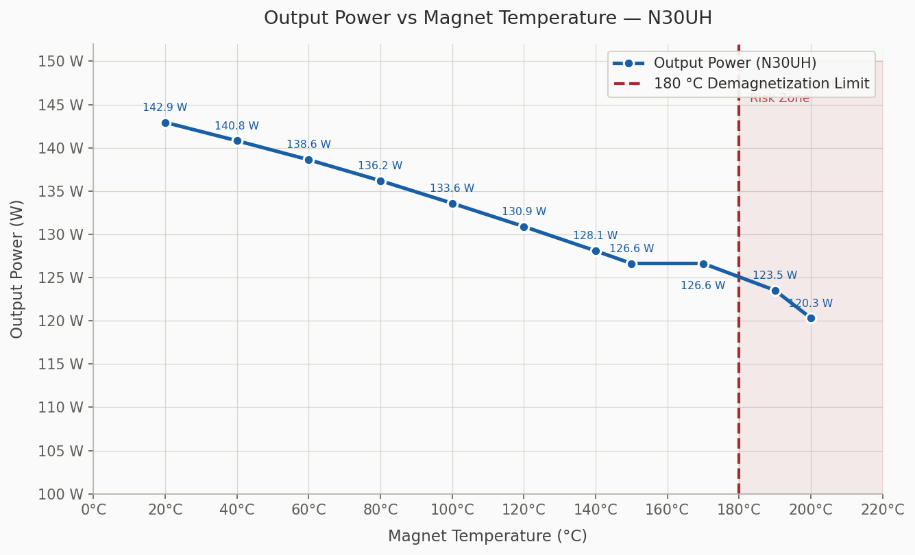
At steady state, hover conditions often define a critical operating point. Magnet temperature is limited by the selected permanent magnet material grade. As magnet temperature increases, remanent flux density decreases, reducing motor torque and back-EMF.
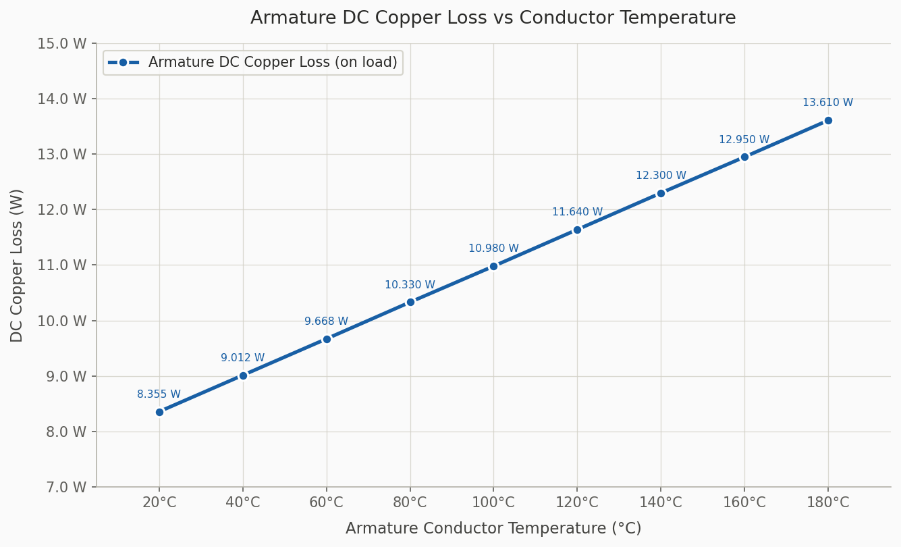
Winding temperature is also critical. As winding temperature rises, electrical resistance increases, which raises copper losses and reduces efficiency. Insulation class limits, such as Class F or Class H, determine how much thermal margin is available.
But drone operation is rarely steady. A drone may hover, climb, cruise, maneuver, and descend within a single mission. Motor-CAD can evaluate drive cycle behavior by calculating losses and temperature changes over time, allowing engineers to see how performance degrades as the motor heats up.
This is important for understanding total electrical power consumption, battery usage, mission range, and how many times a drone can complete a defined drive cycle before reaching thermal or energy limits.
Drive Type and Control Strategy Matter
The webinar also highlighted the importance of drive type.
A sinusoidal or field-oriented control drive can provide lower torque ripple, higher partial-load efficiency, and a quieter acoustic signature, but it requires more complex ESC firmware.
A six-step or trapezoidal drive may use simpler hardware and firmware, but it typically produces higher torque ripple, greater acoustic noise, and higher losses due to harmonic current content.
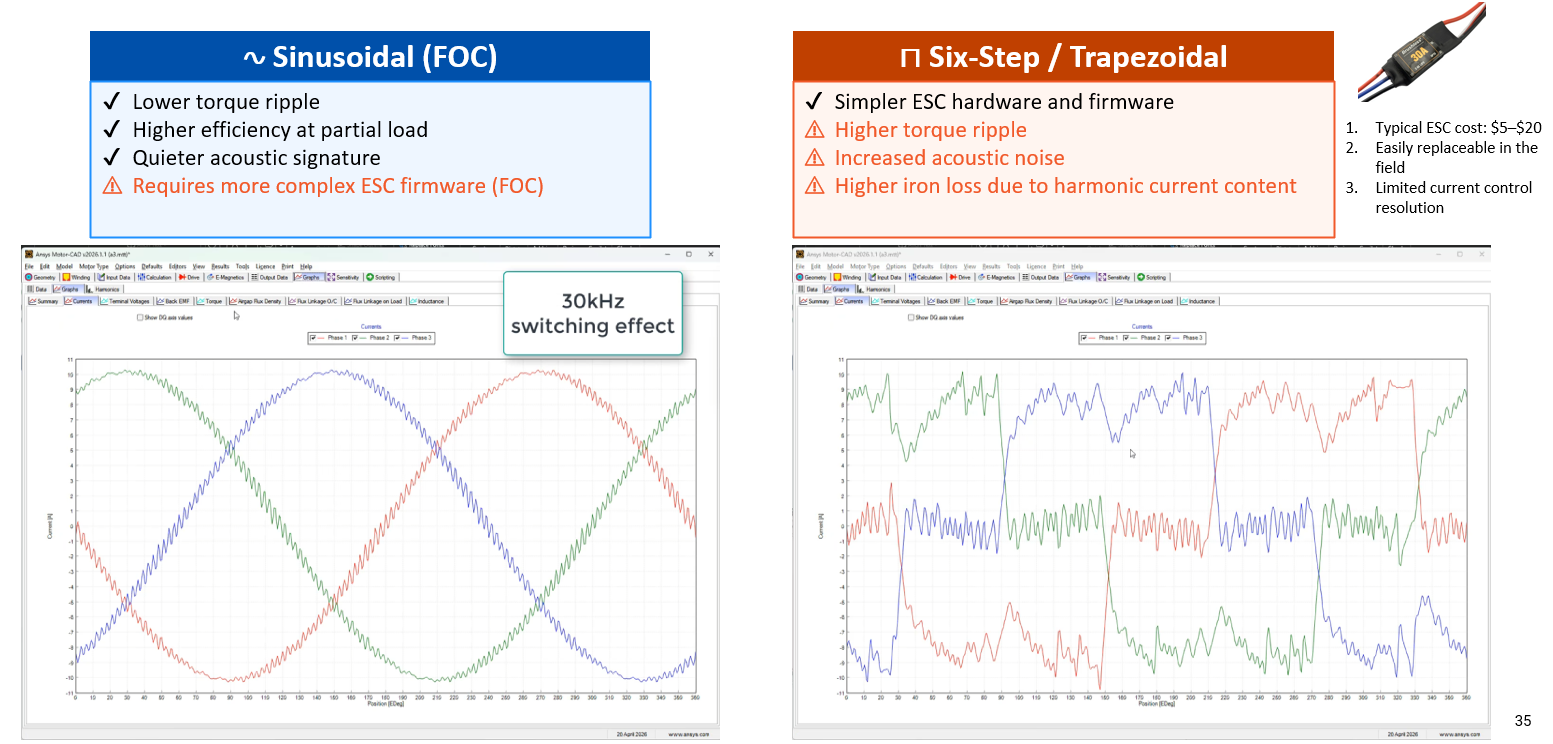
Motor-CAD allows engineers to evaluate these waveform effects, including harmonics, torque ripple, efficiency, and loss behavior. This helps teams understand how the selected drive strategy affects real-world motor performance.
Bringing the Full Workflow Together
The strongest motor design workflows combine electromagnetic, thermal, lab-model, and optimization capabilities.
For drone and eVTOL applications, this means evaluating whether the motor can deliver sufficient torque and power, whether it remains efficient across the operating envelope, whether the thermal design supports the mission profile, and whether the final system is light, compact, efficient, and cost-effective.
By combining Motor-CAD with optiSLang, engineers can develop closed-loop optimization workflows that account for multiple physics and competing objectives. The result is a more complete understanding of how design choices affect performance before physical prototypes are built.
SimuTech Group Can Help
High-performance eVTOL and drone motor design requires more than isolated electromagnetic analysis. It requires a full-system view of propulsion architecture, motor topology, thermal behavior, control strategy, mission profile, and optimization trade-offs.
SimuTech Group’s electromagnetics team helps engineering organizations use Ansys simulation tools to evaluate complex electric machine designs, improve propulsion system performance, and make more confident design decisions earlier in development.
Whether you are working on an eVTOL propulsion system, UAV motor design, drone powertrain optimization, or electric machine development for aerospace applications, SimuTech Group can help you build stronger simulation workflows with Ansys Motor-CAD, optiSLang, and related multiphysics tools.
Want to learn more about high-performance electric motor simulation?
Watch the on-demand webinar for the full technical presentation, or contact SimuTech Group to connect with our electric machine design and simulation experts.

Ahmed Abdelrahman
Lead Engineer
Ahmed Abdelrahman is Lead Engineer – Electromagnetics at SimuTech Group. He specializes in electromagnetics and multiphysics simulation, with a focus on electric machine design. His notable project experience includes multi-phase IPM motor design, developing multiphysics workflow platforms for traction motor design, and motorcycle SRM motor design.

Batuhan Sirri Yilmaz
Engineering Analyst
Batuhan Sirri Yilmaz is an Engineering Analyst – Electromagnetics at SimuTech Group. He specializes in electric motor design and optimization, as well as low-frequency system design and analysis. His notable project experience includes 160 kW magnet-free traction motor design, UAV propulsion system optimization, and 10 kW L2e category production motor development.
- Borer, N. K., Patterson, M. D., Viken, J. K., Moore, M. D., Bevirt, J., Stoll, A. M., & Gibson, A. R. (2016). Design and Performance of the NASA SCEPTOR Distributed Electric Propulsion Flight Demonstrator. 16th AIAA Aviation Technology, Integration, and Operations Conference. https://doi.org/10.2514/6.2016-3920
- Rendón, M. A., Sánchez R., C. D., Gallo M., J., & Anzai, A. H. (2021). Aircraft Hybrid-Electric Propulsion: Development Trends, Challenges and Opportunities. Journal of Control, Automation and Electrical Systems, 32(5), 1244–1268. https://doi.org/10.1007/s40313-021-00740-x
- Ebrahimian, A., Khan, W. A., Iman Hosseini S, S., & Weise, N. (2022). Electrothermal Design of a GaN-Based Axially Stator Iron-Mounted Fully Integrated Modular Motor Drive. 2022 IEEE Transportation Electrification Conference & Expo (ITEC), 733–739. https://doi.org/10.1109/itec53557.2022.9813979
- Clean Sky Joint Undertaking. (2014). ELETAD: Electrical Tail Drive for regional aircraft. FP7 Clean Sky 2012-2014 Program (JTI-CS2).