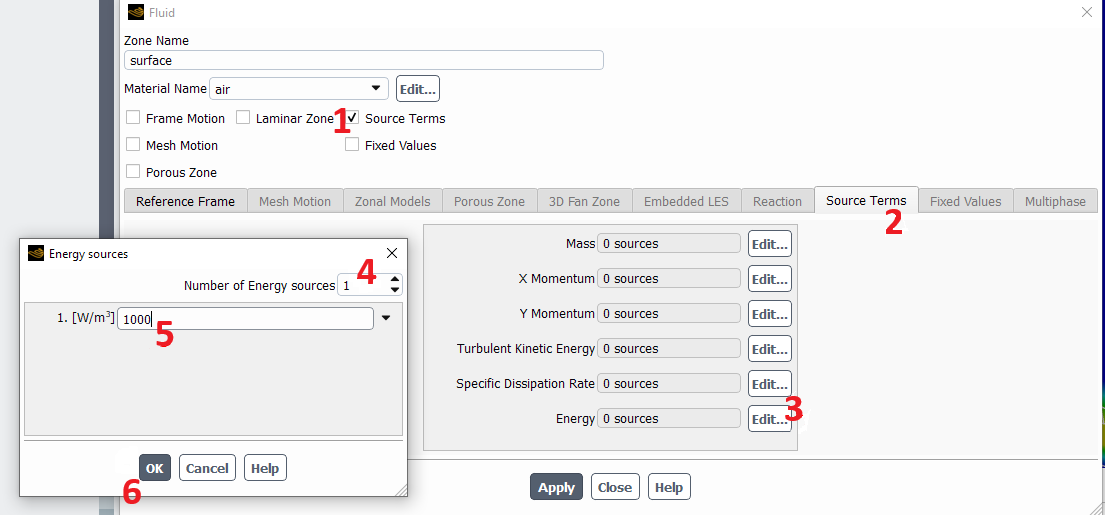
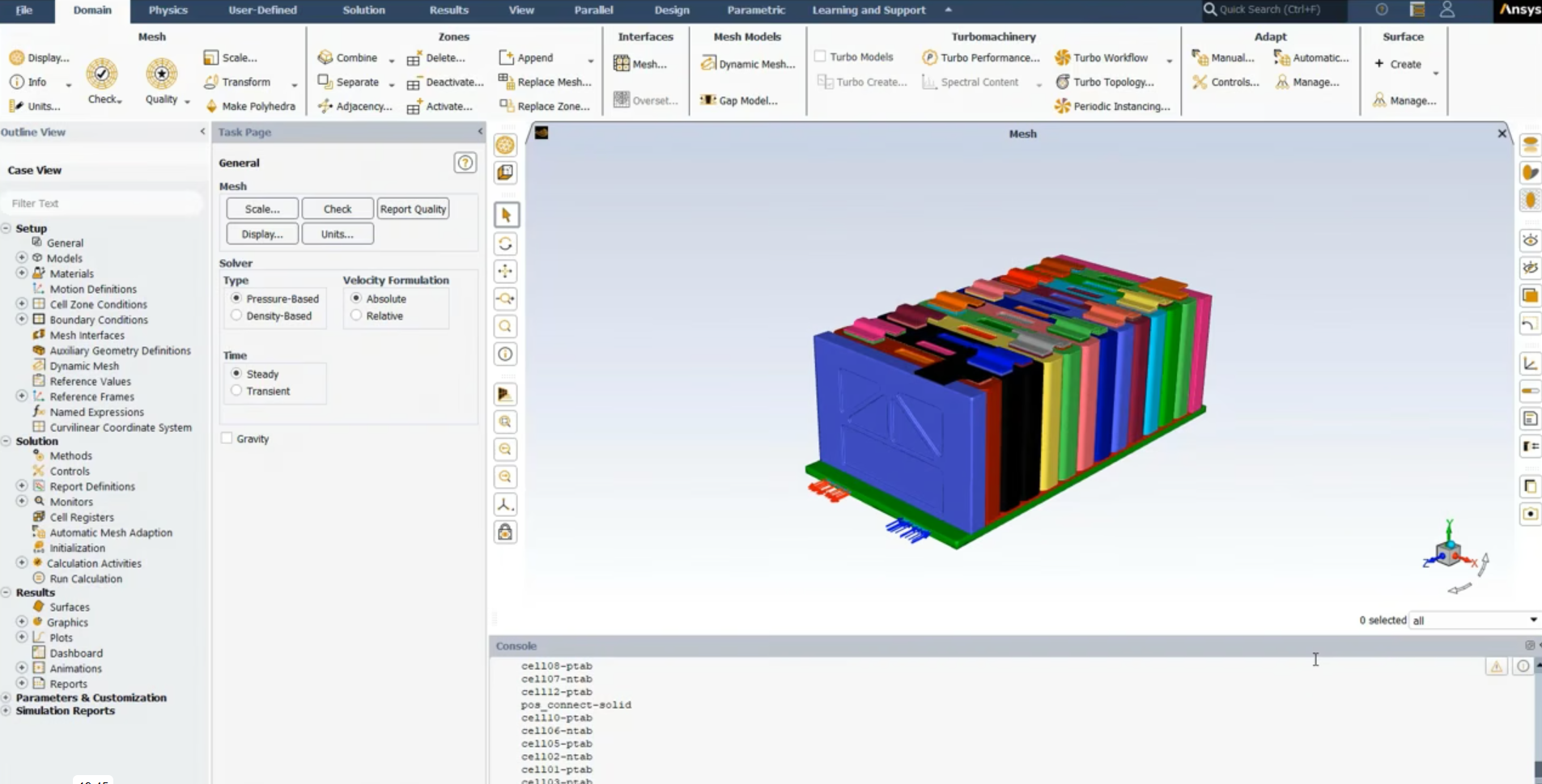
Blog, Tips & TricksBest Practices for Adding an Ansys Fluent Heat Source in 2D and 3D ModelsPublished: 06/11/2026Updated: 06/11/2026
Blog, Tips & TricksFast Battery Charging Simulation in Ansys FluentPublished: 05/26/2026Updated: 05/29/2026
Tips & TricksAverage Temperature on One or More Faces of Bodies in Ansys MechanicalPublished: 05/01/2022Updated: 10/04/2024
Tips & TricksLinearizing Stress Distribution Normal to a Plane in Ansys MechanicalPublished: 03/02/2022Updated: 09/23/2022
Tips & TricksUsing the Pinball Region Field to Fine Tune the Scope of JointsPublished: 02/28/2022Updated: 12/27/2022
Tips & TricksBuoyancy and Floating in a Mechanical Structural ModelPublished: 02/27/2022Updated: 10/04/2024
Tips & TricksMerge CAD Bodies, Like a Multibody Part, Without DesignModeler or SpaceClaimPublished: 02/26/2022Updated: 01/24/2025
Tips & TricksMeasuring Forces Across Contact Pairs in Harmonic AnalysisPublished: 02/23/2022Updated: 06/25/2024
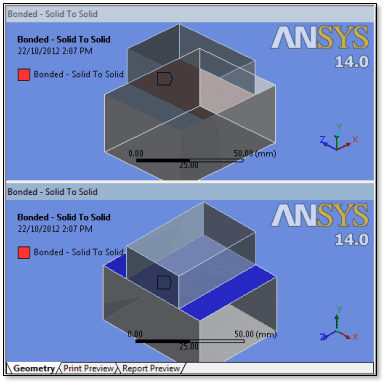
Tips & TricksThermal Contact Settings in Ansys Mechanical WorkbenchPublished: 02/18/2022Updated: 08/11/2022
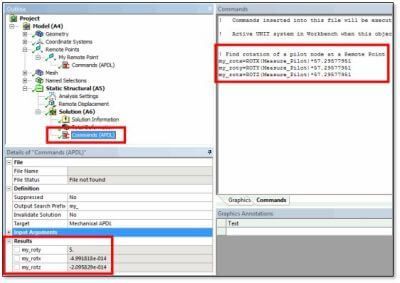
Tips & TricksMeasuring Rotation in Ansys Mechanical WorkbenchPublished: 02/18/2022Updated: 08/15/2022
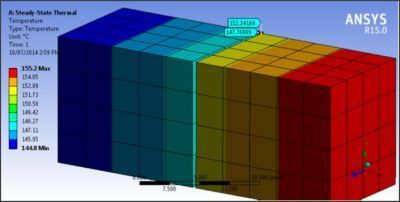
Tips & TricksHeat Conduction Across a Contact Element Gap in Ansys MechanicalPublished: 02/11/2022Updated: 08/17/2022